瑕疵检测 • 机器人 • 液压站 • 桁架 • 夹具 • 抓手
操作简单、安装便捷、部署灵活、协作安全
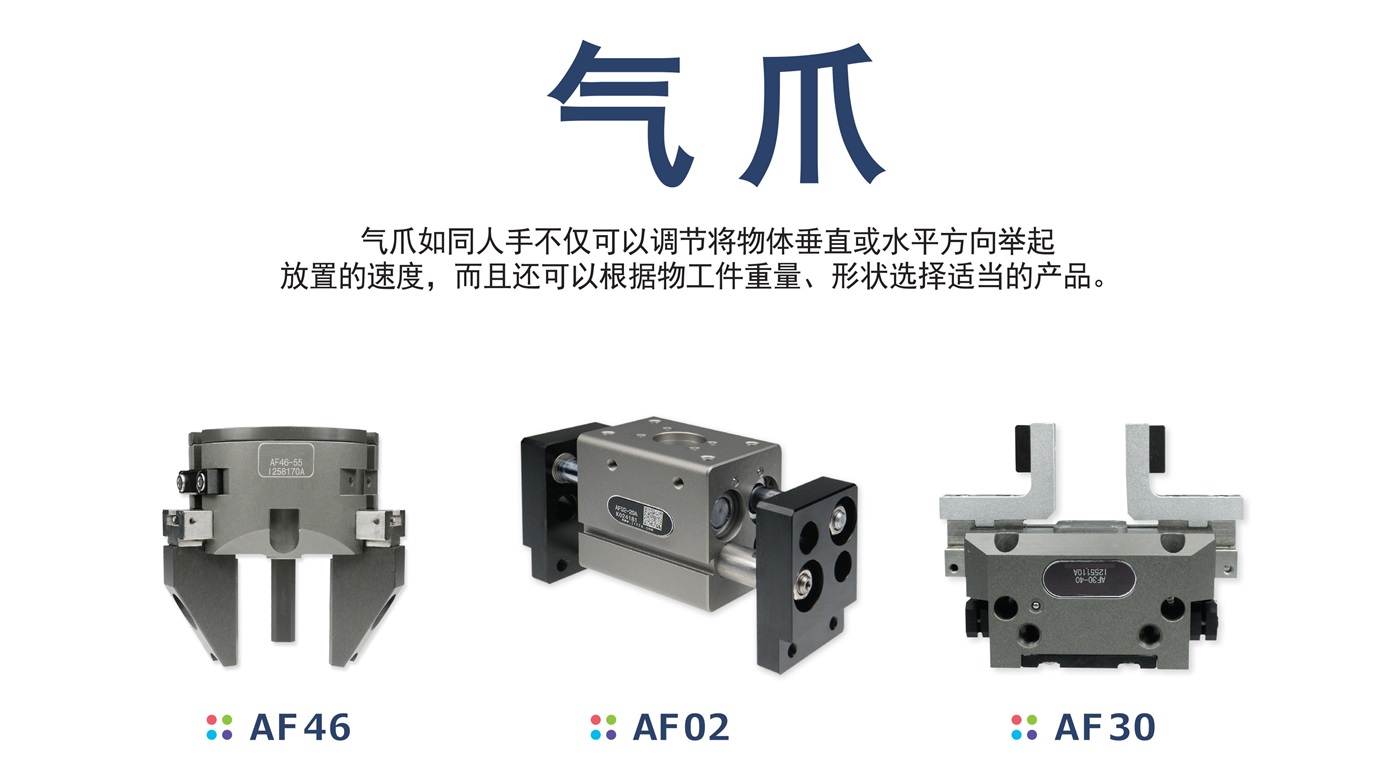
抓手
Automatic production line
product / danrun
抓手
机器人抓手,包括内部具有空腔的手掌部以及若干根分别与所述手掌部转动相连的手指部,所述手掌部开设有与所述空腔连通的介质输入孔,每根所述手指部包括若干个通过转动装置转动相连的转动关节以及若干用于驱动所述转动关节相对转动的驱动装置。
本站关键词:粉末冶金瑕疵检测,粉末冶金裂纹检测,粉末冶金缺陷检测,粉末冶金检测,粉末冶金零件检测,粉末冶金外观缺陷检测,粉末冶金零件裂纹检测